
As NASA came to grips with the enormity of the task handed to them by President Kennedy in his May 1961 congressional address, the list of hurdles standing between America and a manned moon landing was long and formidable. Although NASA’s senior management felt confident that the task could be accomplished before the end of the decade, the finer details of how this would be achieved were far less certain.
Much of the initial focus of Project Apollo fell on the fundamental question of which mission mode should be employed. Some favoured Direct Ascent – launching one huge spaceship directly to the Moon where it would land before returning to the Earth. Others argued Earth Orbit Rendezvous was far more achievable given the limitations of American rocketry at the time. A third group suggested Lunar Orbit Rendezvous may hold significant advantages, but all three approaches had one thing in common – they would involve the controlled landing of a spaceship subject to the Moon’s reduced gravity and lack of atmosphere.
Forward thinking managers at NASA’s Flight Research Centre (FRC) recognised that a means would be needed to allow the control challenges involved in such a landing to be identified and addressed. Furthermore, the astronauts charged with making these lunar landings would need to train in the most realistic conditions possible. This was exactly the sort of engineering and piloting challenge in which FRC excelled. While fixed base simulators could offer a certain amount of experience in this regard, they felt what was really needed was a free-flying vehicle. And so development work began on what initially became the Lunar Landing Research Vehicle (LLRV) later evolving into the Lunar Landing Training Vehicle (LLTV) – unique machines that could simulate flight in one sixth Earth’s gravity and mitigate the effects of drag and aerodynamic forces while proving technologies and techniques required for a controlled final descent and landing on the Moon.
Ideas take shape
Within a month of Kennedy’s speech, Hubert ‘Jake’ Drake, head of the FRC Advanced Planning Office, convened a small group of engineers to form a lunar landing study committee. Initially they examined whether existing VTOL/STOL vehicles such as helicopters could be used for training but they quickly identified a major problem with this approach – any lunar lander would likely need to be able to operate at large tilt angles, up to 28 degrees from vertical as it pitched forwards to gain or backwards or lose velocity in the lunar vacuum. Helicopters by contrast could only achieve maximum pitch angle in the order of 5 degrees. While Drake and his committee recognised that rotary wing experience may prove a useful initial skill for the astronauts to acquire, it seemed this wasn’t the solution to their simulator requirements. Convinced that an entirely new type of free-flying machine would be needed, Drake sought support from Walt Williams, former head of the FRC and now Project Mercury’s director of spaceflight operations. Williams felt that the FRC proposal held great promise and would prove a strong ally in moving the concept forward, but as it turned out the FRC engineers were not the only team reaching the same conclusions.
Bell Aerosystems had a long tradition of working on experimental aircraft with NASA and its predecessor the NACA including the famed X-1 and X-2 rocket planes. In late 1961 Bell had taken part in a study into lunar landing technologies run by General Electric. Bell assembled a small team under Ken Levin and began to develop an initial design for a free-flying lunar landing simulator. Having taken their proposal to NASA headquarters word soon reached the FRC allowing initial discussions between the groups to take place and by December 1961 Bell had submitted a feasibility study to the FRC. Fortuitously it transpired both teams were broadly in line with their approaches to the problem and soon an initial vehicle design began to emerge. In a 1997 interview, Drake was asked about the relative roles played by Bell and NASA at this stage: “I think virtually all of the practical design was Bell’s…To my way of thinking, the ideal role of NASA would be to set up the requirements: ‘What is this thing gonna do?’ ‘How much power should it have?’ …and then leave the contractor alone”
A unique flying machine
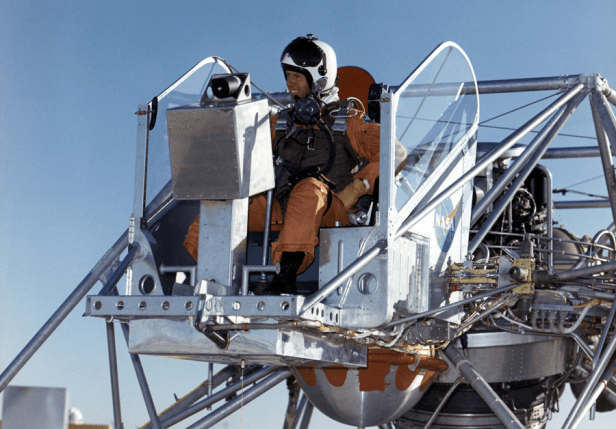
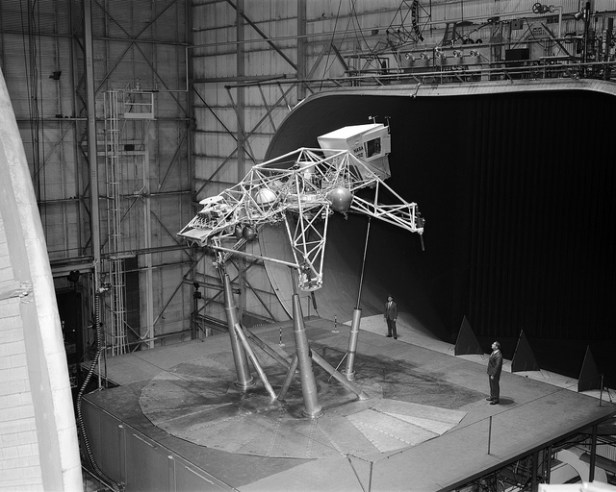
Based around a four legged pyramidal framework the vehicle would solve the challenge of emulating lunar gravity in an ingenious way. A jet engine mounted on gimbals within the structure would provide the initial vertical lift then, on reaching the desired altitude, would be throttled back to support 5 sixths of the vehicle’s weight. The remaining 1 sixth, that being what the lander would actually weigh on the Moon, would now be supported by two lift rockets which the pilot could control. Sets of small maneuvering rockets paired around the vehicle which would control the attitude of the LLRV while in flight. While the principle appeared sound, there were a number of practical challenges to be addressed. The jet engine would need to be automatically controlled once the pilot began the landing as it would now merely be simulating the lunar gravity conditions, rather than forming part of the actual landing control system. The engine would need to point almost vertically down even when the rest of the vehicle was being tilted around it and would also have to throttle its power output automatically to account for the changing weight of the LLRV during flight while performing slight movements to account for drag or other forces such as crosswinds. The whole vehicle would require an electronic control system as opposed to the more traditional control rods or cables and one of the earliest practical analog fly-by-wire systems was developed to perform this role.

For the main powerplant Bell selected the General Electric CF-700-CV turbofan engine, an adapted J-85 engine configured by GE to run vertically in the LLRV. The decision was made to use peroxide fuelled lift and maneuvering rockets as FRC had a good base of experience with a similar system on the X-15. Given the highly experimental nature of the machine it was recognised that an effective crew escape option would be required and FRC again turned to their experiences on other ongoing projects, selecting a lightweight Weber ejection seat similar to the type being used on the M2-F1 lightweight lifting body. This seat was rated as ‘zero-zero’ meaning it could be used at zero velocity and zero altitude – very important given the slow speeds and low operating altitudes planned for the LLRV. A vehicle recovery system was also installed allowing the pilot to deploy a drogue parachute and use emergency lift rockets to provide a controlled landing in the event of engine failure, although the utility of the system was often doubted given the short time available for the pilot to assess emergency situations.

Another key consideration was cost. While Apollo was extremely well funded by generous federal budgets during the first half of the 1960s, the LLRV was very much on the fringes of this with managers in Houston still to be convinced that the vehicle was essential to the programme. Many senior figures within NASA including the influential senior designer Max Faget felt that the moon landing should be carried out automatically rather than ‘flown’ by the crew. Unsurprisingly many within the astronaut office held the opposite view pointing out that as highly qualified pilots they were best placed to make the decisions. Besides, they argued, what if an automated system failed or started steering them towards an unsuitable landing site? In the end (and fortunately for Apollo 11) their arguments carried the day and the LLRV began to gain support and access to funds. Still, as final construction approached the FRC decided to carry this out on-site rather than have Bell finish the job to keep costs down. Both this and the decision not to have contractor demonstration flights broke with the usual procurement protocols, but the LLRV was a very unusual project. Once ready for final construction the first LLRV was moved from Bell’s Niagara Falls plant to the FRC at Edwards AFB but as the project still wasn’t regarded as a key priority, no cargo aircraft could be spared meaning during the spring of 1964 the LLRV had to take a long unceremonious trip across America in the back of a truck.
Final preparations

Walker had been involved with the LLRV since it’s earliest days, working on rudimentary fixed based simulators to assess the vehicle’s range of maneuverability and control layouts. Kluever, a leading helicopter test pilot, suggested that Walker may find helicopter training a useful experience ahead of flying the new vehicle. Taking up Kluever’s invitation the two men undertook a test flight during which Walker became increasingly frustrated at his inability to hover the helicopter. Renowned for his quick temper, Walker told his colleague to land, then stormed away without saying another word. Some days later when unable to find Walker on base Kluever was told that the chief pilot had gone away to receive helicopter flight training in Florida. Walker wasn’t to be beaten by the challenge and subsequently rotary wing training became an essential pre-qualification and proficiency tool for LLRV/LLTV pilots and the astronauts who would make the eventual landings.
Taking flight
Early on the morning of 30th October 1964 the LLRV took its first flight with Walker at the controls. Lasting less than a minute, the flight tested the main lift engine and allowed for the pilot to get a feel for the attitude control system in free flight. Two more flights took place that morning with Walker generally satisfied but making suggestions regarding the sensitivity of the control systems. Initial tests continued over the following months with Walker flying the LLRV for members of the press and Apollo Managers. Mallick undertook his initial flights before the end of the year and as 1964 ended the LLRV underwent a number of modifications including changes to the cockpit layout and the replacements of wheels on the landing struts with dish-like pads. Although the initial months of testing had thrown up many technical and piloting challenges, the project team were developing real confidence in the vehicle and its value as a research tool. Now it was time to begin the simulation of actual lunar landings.
As the programme moved into 1966, Walker transitioned out of the LLRV to train for the XB-70 (he would later lose his life in a collision between his F-104 and the second XB-70) and Kluever picked up the second pilot’s role alongside Mallick. Further changes were made to the vehicle’s configuration to bring it closer into line with the emerging LM. At this stage Weber made the FRC aware of a more powerful rocket for the ejection seat, providing for a greater degree of pilot safety, but adding some additional weight. After much debate, the decision was made to remove the vehicle’s recovery system to remove weight and allow for this modification. From now on, should serious control problems or mechanical failures strike the LLRV the pilot’s escape would be put ahead of saving the vehicle.
A change of location and a new role
With the start of Apollo flight operations fast approaching and confidence in the LLRV’s abilities growing it was time for the programme to transition from research into training. To do this Bell were to provide three enhanced versions of the LLRV under the new designation of Lunar Landing Training Vehicle (LLTV). These new versions would benefit from improvements to the electronic control system and larger propellant tanks providing increased flight time. A semi-enclosed cockpit featuring Lunar Module-style hand controllers and instrument displays would provide the astronauts with a more realistic simulation of the LM piloting experience. While all LLRV flights up to this point had taken place at Edwards AFB, the programme would now move across country to lessen travel time for the astronauts. Initially LLTV detachments were proposed for Ellington AFB near Houston and Cape Canaveral in Florida, but in reality all of the astronaut training flights took place at Ellington reducing costs and the demands on maintenance crews. A final act for the FRC crews was to train up their Houston counterparts and ensure Bell were able to carry all LLRV modifications and experience into the LLTV. As for the LLRV, the two vehicles built and flown in the Mojave were now transferred to Houston to cover initial astronaut training prior to the LLTVs becoming available. Only the first vehicle was flown in this role with the second being used for spare parts.
Apollo commanders would undergo helicopter training and spend time in the fixed base LM simulator before transitioning to a LLRV/LLTV fixed in a pivoting test rig. This allowed them to gain familiarity with the vehicle before undertaking actual free flight landing simulations. With restrictions on the flying time available (becoming more pressing as vehicles were lost) only the prime and backup commanders flew these simulations with the lunar module pilots making do with time in the more limited Lunar Landing Research Facility at NASA’s Langley facility.
Neil Armstrong was the first of the Apollo astronauts to fly the LLRV in Houston during March 1967. A long hiatus followed these initial flights owing to a period of reassessment of training procedures in the wake of the Apollo 1 fire, but as with so much in the Apollo programme this delay allowed improvements to be made and efforts to be consolidated before the final push to the Moon. Flights resumed in early 1968 by which time the LLRV was joined at Ellington by the LLTVs, but on the 8th May 1968 Armstrong was forced to eject from the LLRV when Helium used for pressurising the attitude control system became depleted without adequate warning to the pilot or ground controllers. Fortunately for Armstrong the Weber ejection seat worked as advertised, but the LLRV was destroyed. All further training would now take place in the LLTVs.

Following the Apollo 11 and 12 missions, Neil Armstrong and Pete Conrad were able to feed back their actual experiences of landing the LM to the LLTV team. The key learning from the returning commanders was that their experiences in the LLRV/LLTV had been extremely useful in preparing them for the landing task. Relating the LM to the LLTV, Armstrong commented “…All in all I felt very comfortable – I felt at home. I felt like I was flying something I was used to and it was doing the things that it ought to be doing.” Conrad added “You do get yourself in situations in the LLTV that you can’t get in any place except the Moon.” Acknowledging that it was unlikely that any Apollo astronauts would get to make multiple landings on the Moon, the Astronauts and Apollo managers accepted that in spite of its attendant risks, flying the LLTV was clearly the best way of maximising the chances of each commander being able to make a safe landing on their first attempt.

Conclusion
Although the LLRV and LLTVs provided an essential training aid to the astronauts, it’s also important to recognise the role they played in helping define the final configuration of the LM by giving NASA and Grumman a high degree of confidence in their landing profiles and the amount of propellant (and consequently vehicle weight) required to achieve the task.
That such an unconventional machine would be approved, built and repeatedly flown not only by test pilots but by the Apollo astronauts says much about the can-do practical attitude of NASA’s Flight Research Center during the early Sixties as well as NASA’s wider acceptance of risk during the early phase of their human space programme. It seems unlikely that such an inherently unstable and risky machine would be considered practical today although ironically advances in computerised control – direct descendents of the LLRVs analog fly-by-wire system – would undoubtedly make piloting a modern version of an LLRV a more managable task than that facing the early pilots at the FRC.
It is impossible to say whether the Apollo landings could have succeeded without these unique research and training vehicles but what is beyond doubt is that they allowed unique knowledge and experience of an entirely alien flight environment to be gained here on Earth through outstanding engineering ingenuity.
Sources
Unconventional, Contrary and Ugly: The Lunar Landing Research Vehicle – NASA Monograph – G. J. Matranga, C.W. Ottiger, C. R Jarvis with D.C. Gelzer
Chariots for Apollo: The NASA history of Manned Lunar Spacecraft to 1969 – C.G. Brooks, J.M. Grimwood, L.S Swenson Jr.
Interview with Hubert M. Drake by Dr J.D. Hunley (April 16th 1997) – from NASA Monograph The Spoken Word II: Recollections of Dryden History edited by Curtis Peebles
Utility of the Lunar Landing Training Vehicle: Interview with Gene Cernan – from Apollo 17 Lunar Surface Journal by E.M. Jones
The Smell of Kerosene: A Test Pilot’s Odyssey – Donald L. Mallick
First Man: The life of Neil Armstrong – James R. Hansen

Great writeup! The last LLTV still hangs in the Building 2 (Teague Auditorium) lobby at Johnson Space Center.
LikeLiked by 1 person
That is a terrific article. I have always been curious about this beast. I wonder if lessons learned were applied to later vehicles like the Harrier and the F-35. In hindsight it was a great achievement given the relatively primitive capabilities of FBW and on-board computation at the time.
LikeLike
Thanks for the kind words! Appreciate you taking the time to read it.
Not sure how much future VTOL aircraft benefitted, but the use of FBW was definitely a key legacy from this programme.
Post Apollo, Armstrong played a key role in pushing for the F8 digital FBW testbed having been convinced by LLRV/LM that this would be a game changer for aircraft control. The DFBW F8 used a similar digital system to the LM which in turn was a direct descendant of the analog system used on the LLRV
LikeLike
Actually the design of the Harrier design dates back to the Hawker Siddeley P.1127 (first flight November 1960) so not a lot of opportunity for the LLRV to influence it (first flight October 1964)
LikeLike
Yes, very true. Hubert Drake recalled looking at a number of existing VTOL designs which included the British Rolls Royce thrust measuring rig (the original ‘flying bedstead’!), Bell X-14 etc. to see if any of them could be adapted as a lunar landing trainer but I’m not sure if the P.1127 was an influence.
Rolls Royce engines were seriously considered by Bell and NASA for the LLRV as they offered superior thrust:weight but as I recall the projected delivery times would have caused unacceptable delays.
Of course the unique quality of the LLRV was one that is of no real use to other VTOL projects – the ability to simulate 1/6th gravity
LikeLike
My point was that I was responding to AVEROW45’s post regarding “I wonder if lessons learned were applied to later vehicles like the Harrier and the F-35.” Of course the P.1127 didn’t influence the LLRV.
Since this article came out I found another interesting item; check out the 1954 Rolls-Royce Thrust Measuring Rig also known as the Flying Bedstead. https://www.youtube.com/watch?v=f8W2SI4c93s
LikeLike
“For the main powerplant Bell selected the General Electric CF-700-CV turbofan engine, a heavily adapted J-58 engine configured by GE to run vertically in the LLRV.”
I think you need to double check that. The CF 700 is indeed a General Electric turbofan while the J58 was a Pratt & Whitney turbojet that powered the SR-71, ran on non-standard JP-7 fuel and was designed to run in continuous afterburner.
LikeLiked by 1 person
thanks for picking that up – should have been J85 not J58!
LikeLiked by 1 person